一文解析 NumPy ndarray 多维数组结构设计
从 NumPy ndarray 的内存布局以及设计哲学,深入浅析 ndarray 多维数组的结构设计,以及相关属性。
What is NumPy?
官方描述 >>>
NumPy provides an N-dimensional array type, the ndarray, which describes a collection of “items” of the same type. The items can be indexed using for example N integers.
ndarray 是 NumPy 中的 多维数组,由 数据类型相同 的元素组成的元素序列,且可以被 索引。
如下所示:
1 | import numpy as np |
NumPy 数值计算库的核心特性 >>> 定义了一个 n 维数组对象,ndarray 对象(NumPy 数组也就是 ndarray 多维数组),拥有丰富的数学函数,以及对高维数组的直接处理能力。
Ndarray 的内存布局
首先给出 ndarray 的内存布局示意图:
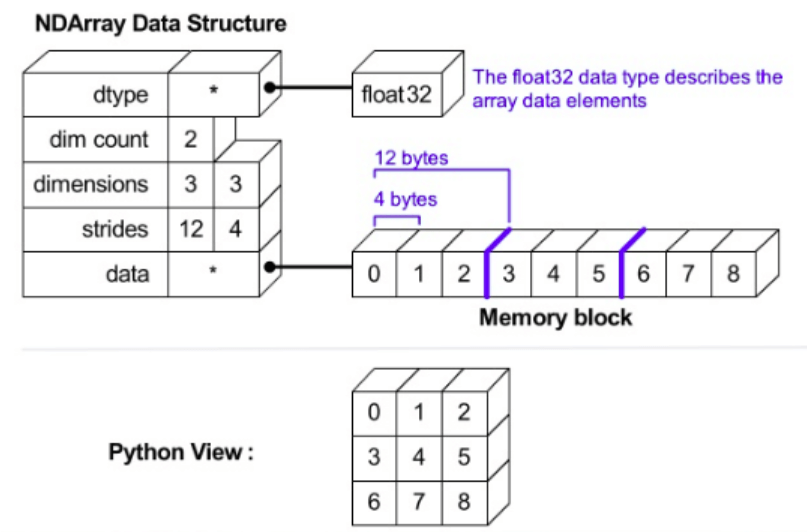
可大致划分成 2 部分 >>>数据部分和解释方式:
raw array data:为一个连续的 Memory Block,存储着原始数据,以类似C或Fortran中的数组进行连续存储;metadata:对上面内存块的解释方式。
其中,metadata 包含如下信息:
dtype:数据类型 >>> 指定了数组中每个元素占用多少个字节,这几个字节怎么解释(例如:int32、float32等 NumPy 数据类型);ndim(dim count):数组维度(数值) >>> 数组有多少维;shape(dimensions):数组形状(元组) >>> 每个维度上的元素数量;strides:维间距或步幅(元组) >>> 到达当前维下一个相邻数据需要前进的字节数;
以上 4 个信息构成了 ndarray 的 indexing schema >>> 如何索引到指定位置的数据,以及这个数据该怎么解释。
除此之外的信息还有:字节序(大端小端)、读写权限、C-order(行优先存储) or Fortran-order(列优先存储)等,如下所示:
1 | arr.flags |
可以很清晰看出,Ndarray 内存设计 >>> 将数组的 数据部分 && 解释方式 进行了分离。
Ndarray 的设计哲学
事实上, Ndarray 数组的设计哲学就在于 数据存储 && 与其解释方式 的分离,或者说 >>> 副本(copy) && 视图(view) 分离。这种分离方式,让尽可能多的操作发生在 解释方式(view)上,而尽量少地操作实际存储数据的内存区域。
简单来说,副本和视图是使用原数组的两种不同方式。先来看一个样例:
1 | import numpy as np |
样例分析:虽然 a[[1, 2]] 和 a[1:3] 的输出结果相同,但从 base && flags.owndata 属性的输出结果来看,两者是有差别的。这是因为,a[[1, 2]] 得到的是原数组的副本(copy),而 a[1:3] 得到的是原数组的视图(view)。
那么 base && flags.owndata 属性到底代表数组的什么?!!
| ==================================== 👇👇👇 base && flags.owndata 👇👇👇 ==================================== |
我们提到过,Numpy 数组的内部结构包括:数据部分(数据存储区)&& 解释方式(数据结构信息区)。
数据存储区是用于存储数组的数据 >>> Numpy 数组中的数据可以指向其它数组中的数据,这样多个数组可以共用同一个数据(数据共享)。
ndarray.base:用于判断数组中的数据是否来自于别的数组;ndarray.flags.owndata:用于判断数组是否是数据的所有者;
就上例而言,arr.base 和 arr[[1, 2]].base 返回的都是 None,说明两个数组中的数据均来自于自生。而 arr.flags.owndata 和 arr[[1, 2]].flags.owndata 返回的都是 True,说明两个数组都是数据的所有者。
我们再使用 ndarray.ctypes.data 属性来查看一下数组中数据(Memory Block)的物理地址验证一下:
1 | arr.ctypes.data |
| ================================================== Split Line =============================================== |
重新来看:a[[1, 2]] 得到的是原数组的副本(copy),而 a[1:3] 得到的是原数组的视图(view)?
- 视图是对原数组的引用,或者自身没有数据,与原数组共享数据;
- 副本是对原数组的完整拷贝,虽然由原数组中数据拷贝而来,但是它相对于原数组是独立的;
视图(View)
NumPy 中满足如下可产生原数组的视图(View):
- 对原数组的引用;
- 自身没有数据,与原数组共享数据;
如下所示:
1 | import numpy as np |
视图原理剖析示意图 >>>

可见,view() 函数 && reshape 操作 && transpose && Slice 操作生成的是原数组视图(view),共用原数组 arr 数据存储区中的数据,但由于它们都有属于自己的数据结构信息区,因此可以将 arr 数组中的原始数据以自己的方式进行表达(指定不同的形状、dtype 等)。
view 机制的好处显而易见,省内存,同时速度快~~~
副本(Copy)
副本是对原数组的完整拷贝,虽然由原数组中数据拷贝而来,但是它相对于原数组是独立的。
使用 copy() 函数 && 数组高级索引方法,均可以返回数组的副本(Copy)。
如下所示:
1 | import numpy as np |
副本图原理剖析示意图 >>>
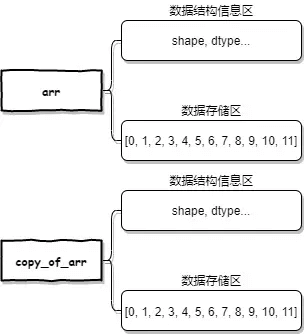
由于副本和原数组是相互独立的,改变副本或者原数组中的元素值,相对应的原数组和副本中的元素值并不会发生改变!!!
设计的优异性
为什么 ndarray 可以这样设计?!!
由于 ndarray 是为数组和矩阵运算服务的,ndarray 数组中的所有数据都是同一种类型(设计核心依据)(如 int32 && float64...),其稠密地排列在一起(元素序列)。取出时根据 dtype 现 copy 一份数据组装成 scalar 对象输出。
这样极大地节省了空间,scalar对象中除了数据之外的域没必要重复存储,同时因为连续内存的原因,可以按秩访问,速度也要快得多。

👇👇👇 Ndarray 性能优势 👇👇👇
这里,可以将 ndarray 与 Python 中的 list 对比一下 >>>>
List 可以容纳不同类型的对象,像 string、int、tuple 等都可以放在一个 List 里。故 List 中存放的是对象的引用,再通过引用找到具体的对象,这些对象所在的物理地址并不是连续的,如下所示:

所以相对 ndarray >>>
- List 访问到数据需要多跳转 1 次,List 只能做到对对象引用的按秩访问,对具体的数据并不是按秩访问,所以效率上 ndarray 比 List 要快得多;
- 空间上,ndarray 只把数据紧密存储,而 List 需要把每个对象的所有域值都存下来,所以 ndarray 比 List 要更省空间。
ndarray 设计机制的好处显而易见,省内存,同时速度快~~~
N-Darray 的理解
如何合理的想象多维数组???
以图书馆来举例:
一维数组 >>> 一条线(一个行/列向量)
二维数组 >>> 一页纸
三维数组 >>> 一本书(多页纸)
四维数组 >>> 书架(多本书)
五维数组 >>> 图书室 2201(多个书架)
六维数组 >>> 图书馆某一层,2楼/3楼(多个图书室)
七维数组 >>> 整个图书馆
…
…
第 N 维数组 >>> … 宇宙 …
| ================================================== Split Line =============================================== |
👇👇👇 关于 Ndarray 中的一维行向量、列向量的理解 👇👇👇
你可能听过这样的说法:“写数组的时候是横着写的,而其实数组是列向量(更直观)”。
许久以来都有一个疑问 >>> NumPy 中的一维向量究竟是 行向量 还是 列向量 呢???
↓↓↓↓↓↓ 测试思路(向量点乘维度要对应的特性) ↓↓↓↓↓↓
- 构建一个
4*2的数组 arr 和一个一维的长度为2的 Numpy 向量 vec; - 使用 arr 点乘 vec >>> 点乘
np.dot(arr, vec)不报错,说明一维向量为2*1的列向量;如果报错,说明向量肯定不是列向量。 - 如果不报错,先将 vec 转置,然后继续使用点乘
np.dot(arr, vec)>>> 如果还不报错,说明一维向量 vec 既可以当做列向量也可以当做行向量。
先来进行第 1 && 2 步测试:
1 | import numpy as np |
可见,一维向量 vec 可以作为列向量与矩阵 arr 相乘。
继续进行第 3 步测试:
1 | import numpy as np |
居然也可以进行点乘,Amazing!!!说明 NumPy 中的一维向量既可以作为行向量,也可以作为列向量存在。
总结下来,可以得到如下结论:
[1] >>>> 一维数组的转置仍是自己本身,这点根据上述实验的一维向量 vec 的 shape 就能看出来,vec.T(转置后)维度不变。
[2] >>>> NumPy 中的一维向量,可以认为它既不是行向量也不是列向量,只是一个长度为 2 的一维向量。也可以把理解为它既可以做行向量同时也能做列向量,具体是行向量还是列向量根据与他进行点乘的矩阵而定。
[3] >>>> NumPy 一维向量既可以做行向量也可以做列向量,对于任意一个给定的一维向量,你无法确定它到底是行向量还是列向量。故,习惯上用二维矩阵而不是一维矩阵来表示行向量和列向量,因为二维必定能够确定他是行向量还是列向量。
对于 3,见下例:
1 | # 行向量: |
Ndarray 属性详解
这一章节,我们将深入了解 Ndarray 数组中行列优先、维度、轴、形状,以及维间距等…
C/F Order
前面提到过,Ndarray 数组中有一个 order 属性,是指数组的内存布局,常见的有:C-Order(行优先) && Fortran-Order(列优先)。
其中,C-Order 是指类似于 C 语言中数组内存布局,而 Fortran-Order 是指类似于 Fortran 语言数组内存布局。
那么 >>>> Fortran 的列优先是什么含义,与 C 语言行优先有何区别???
| ================================================== Split Line =============================================== |
Fortran 也好,C 也好,操作的数组都存在于内存中,而 内存中是没有行列概念的。一维/二维/三维数组,都是 “一条线(序列)” 一样的存储在内存中。在这个层面上,Fortran 与 C 没有区别。
如下范例,内存中存储了 8 个数据:1,2,3,4,5,6,7,8(蓝色框)。
假设(真实地址相似) >>> 由于数组中元素数据类型相同,每个元素所占的字节数固定(int32 && float32),为 4 个字节。它们对应内存中的地址为(连续内存区):
1 | 0x0041F100 , 0x0041F104 , 0x0041F108 ...... 0x0041F11C |

不同的是,Fortran 和 C 会以不同的命名习惯来对内存中的数据进行 “命名” 以实现索引,并通过各自的习惯来寻找对应的地址(索引)。
这是由于高级语言通常不会直接访问内存地址,所以 Fortran 和 C 使用数组来 “命名” 这些内存地址,并且通过(数组 + 下标)的索引方式来访问这些内存地址。
1D-Ndarray >>> 如果把这一段内存地址视为 8 元素的一维数组,Fortran 和 C 的规则差别不大,Fortran 默认以 1 开头,而 C 则以 0 开头(索引)<<<< Ndarray 都是从零开始。
2D-Ndarray >>> 如果把这一段内存地址视为 2*4 元素的二维数组,则 Fortran 和 C 还有另一个差异(结合示意图理解):
- Fortran 会先变化前面的维度,即顺序为
a(1,1) , a(2,1) ....前面的 1 先变化为 2,后面维度始终保持为 1。直到循环完毕后,再将后面的维度加一,即a(1,2) , a(2,2).....; - C 语言则相反,会先变化后面的维度,即顺序为
a[0][0] , a[0][1] ....后面的 0 先变化为 1,前面维度始终保持为 0。直到循环完毕后,再将前面的维度加一,即a[1][0] , a[1][1].....。
因此,对于二维数组来说,Fortran 的 a(m, n) 默认情况下,对应于 C 语言的 a[n-1][m-1]。
从 Ndarray 设计哲学来看,C/F Order 是对于 Memory Block 中数据的一种解释方式~~~
可见,对于数组中行列的说法很容易混淆。并且,对于高维数组是不存在真正的行和列的,轴(axis)才是始终有意义的表达方式。
维度/轴(Axis)
事实上,对于 Ndarray 轴和维度的概念是通用的。
以三维数组为例,其包含列(Row)、行(Col)、页(Page)三个维度 >>>
再来看其轴(axis),它包括 0、1、2 三个轴(即 axis=0 && axis=1 && axis=2)。其中,axis=0 代表的是页(Page)这一维;axis=1 代表的是列(Row)这一维;axis=2 代表的是行(Col)这一维。
也就是说,axis 越小,其代表的层次(维度)越高。
你应该记得,前面我们说过:对于多维数组(N-Dim)的显示结果和与列表(List)相同,每多嵌套一层,就代表多一个维度(凭借此你可以很轻易的判断出某个 ndarray 数组的维度)。
简单来说,就是 “最外面的括号代表着 axis=0,依次往里的括号对应的 axis 的计数就依次加 1”。
| ================================================== Split Line =============================================== |
↓↓↓↓↓↓ 2D Ndarray ↓↓↓↓↓↓
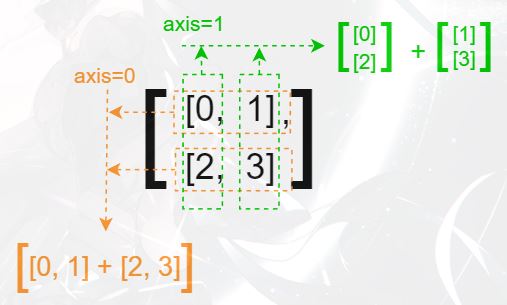
举个例子,假设二维 ndarray 数组:[[0, 1], [2, 3]],其 axis 的对应方式就是:

相应轴上的求和(sum)运算推理(确认各轴上元素,求和),先以二维数组为例:
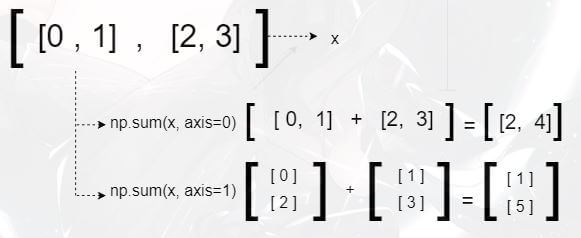
各轴元素对应情况解析 >>>
代码验证上述推论过程:
1 | x = np.arange(4).reshape(2, 2) |
哎?!!貌似出来的结果比我们推导的结果的括号要少一些。这是因为诸如 np.sum 这种函数中有一个参数叫 keepdims,其默认值是 False,此时它会把多余的括号给删掉。假如我们把它设为 True 的话,就可以得到和推导中一致的结果了:
1 | np.sum(x, axis=0, keepdims=True) |
| ================================================== Split Line =============================================== |
↓↓↓↓↓↓ 3D Ndarray ↓↓↓↓↓↓
下面来看一个更 “高维” 一点的样例(三维):

代码验证上述推论过程:
1 | x = np.arange(8).reshape((2, 2, 2)) |
以及:
1 | # Axis 0: |
形状(Shape)
通过对 Ndarray 维度/轴的认识,我们已经知道 >>>> 哪个 axis 对应于数组中的哪些元素。
接下来,通过 ndarray.transpose 转置函数来认识一下数组形状(Shape)的本质。
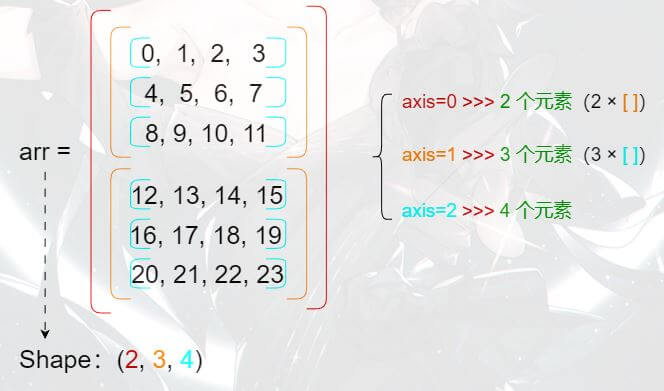
从纸面上来看,如果一个高维数组 arr 的 shape 是 (2, 3, 4),那么 transpose 的作用就是把这个 shape 中各个数的顺序改一改。如下:
1 | import numpy as np |
可以看到 >>>> 数组 shape 中的各个数就是对应 axis 上的元素个数(层次由高到低)。
如上述实例中数组 arr,其示意图如下:
↓↓↓↓↓↓ 换一种思路理解 ↓↓↓↓↓↓
数组 arr 中共有 24 个元素 >>>>
在 axis=0 轴上,只有两个元素(橙色矩阵)。可以理解为:在 axis=0 这个 axis 上,每隔 24 / 2 = 12 个数就跳一下。
在 axis=1 轴上,由于一个橙色矩阵中只有 24 / 2 = 12 个数。可以理解为:在 axis=1 这个 axis 上,每隔 12 / 3 = 4 个数就跳一下。
在 axis=2 轴上,由于一个蓝色向量中只有 12 / 3 = 4 个数。可以理解为:在 axis=2 这个 axis 上,每隔 4 / 4 = 1 个数就跳一下。
哎,我们得到一个元组 >>> (12, 4, 1) <<< 这就是维间距/步幅(Strides) <<< 记录了每个 axis 上跳过的数。
| ================================================== Split Line =============================================== |
激动人心的时刻到了:
transpose 的本质,其实就是对 axis/shape/strides 中各个数的顺序进行调换(换轴)。如上实例:
1 | x.transpose(1, 0, 2) |
在 transpose(1, 0, 2) 后,相应的 strides 会变成 (4, 12, 1)。而从上图可以看出,transpose 的结果确实满足:
- axis=0 的 axis 上,每隔 4 个数跳一下;
- axis=1 的 axis 上,每隔 12 个数跳一下;
- axis=2 的 axis 上,每隔 1 个数跳一下。
👇👇👇 需要注意 👇👇👇
有没有同学计算之后,认为换轴后 strides 会变成 (8, 4, 1)???
你需要注意的是,数组中数据元素是在一个连续的 Memory Block([0, 1, 2, 3, 4, ..., 23])存储的,而 transpose 仅是数据的一种解释行为,数据元素序列是不会变化的!!!
以 axis=0 轴为例,每隔 4 个数跳一下,指的是 >>> 元素序列上元素每隔 4 个数跳一下,即跳到 axis=0 轴下一个元素 >>> [0, 1, 2, 3] --> [4, 5, 6, 7] -->[8, 9, 10, 11]。
维间距/步幅(Strides)
我们知道的是,执行换轴操作(transpose)后,会同时引发数组形状(Shape)和步幅(Strides)的变化,这是必然的!!!
代码验证上述推论过程:
1 | import numpy as np |
哎,怎么和上面实例提到的 Strides 不一样啊?!!
事实上,维间距/步幅(Strides)记录的是 >>>> 每个 axis 轴上跳过的字节数(Bytes)。
所以,你需要在上面的基础上乘以每个元素的字节大小,验证一下:
1 | x.itemsize |
👇👇👇 总结一下 👇👇👇
数组 x 以 96(24 个值 * 4 = 96) 个字节的形式存储在内存中,一个接一个(连续内存块)。数组的维间距/步幅告诉我们 >>> 要沿着某个轴移到下一个位置,需要在内存中跳过多少个字节。
偏移量(Offset)
有时候,你会见到元素偏移量的说法,这里也来简单认识一下。
对于数组元素偏移量 >>>> 当前数组元素的地址 与 数组首地址 的差值。 <<<< 相对于首元素的偏移
↓↓↓↓↓↓ 一维数组:A[N] ↓↓↓↓↓↓
对于一维数组,索引即偏移。
↓↓↓↓↓↓ 二维数组:A[M][N] ↓↓↓↓↓↓
对于任一元素 A[i][j] 的偏移量的计算方法就是:i*N+j。
↓↓↓↓↓↓ 三维数组:A[O][M][N] ↓↓↓↓↓↓
对于任一元素 A[i][j][k] 的偏移量的计算方法就是:i*M*N + j*N + k。
很好理解,不多解释~~~
参考链接:
https://blog.csdn.net/zengmingen/article/details/106894280
https://www.cnblogs.com/shine-lee/p/12293097.html
https://zhuanlan.zhihu.com/p/199615109
https://blog.csdn.net/doubleguy/article/details/121566140
https://blog.csdn.net/qq_34035425/article/details/123251659
https://blog.csdn.net/pql925/article/details/84583236
https://blog.csdn.net/qq_43320208/article/details/121509309
一文解析 NumPy ndarray 多维数组结构设计
https://www.orangeshare.cn/2018/01/20/yi-wen-jie-xi-numpy-ndarray-duo-wei-shu-zu-jie-gou-she-ji/
install_url to use ShareThis. Please set it in _config.yml.