The Pixel Matrix Representation Of Image
在计算机视觉中,图像是以像素矩阵(Image Pixel Matrix)的形式进行表示和处理的。
计算机视觉
我们知道,图像(图片)是 三维现实场景的二维表示。
一切看似复杂的计算机视觉项目,其基础都会回归到单张(灰度/彩色/黑白)图像上。
那么,计算机是如何认识以及处理图像数据的?!!
像素网格
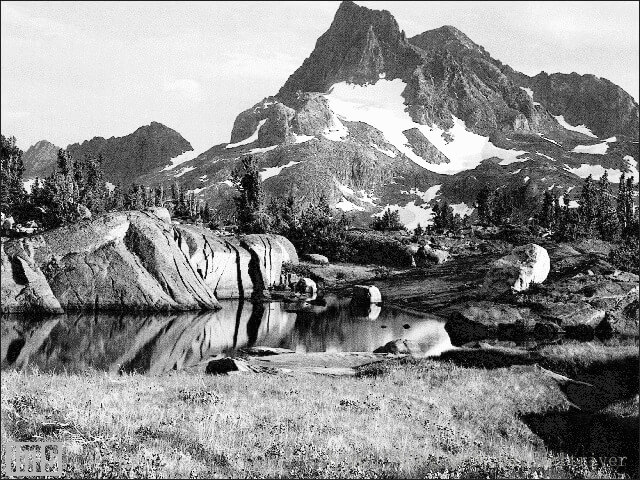
如果你在某个观景处拍张照片,就可以得到它的二维图像,这是计算机 “看” 图的第一步。
这张图像包含的信息有:景物的颜色、形状、表观大小(随摄影距离的远近,物体表现得更大还是更小),以及随照明条件的不同而产生的不同阴影等。(为了避免彩色带来的复杂性,这里将通过其灰度图像进行说明)
此时,如果你一直放大图片中的某一小部分,最终会发现 >>>> 原来,计算机中图像是由一个个小块(这就是像素)组成的二维网格(像素网格):
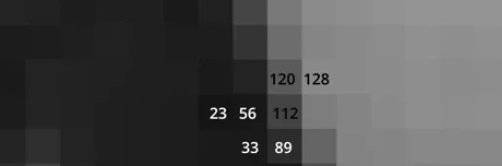
事实上,像素网格中的每个像素都有一个对应的数值(像素值),取值范围是 0~255(其中,0 表示最暗黑色;255 表示最亮白色)。
这样,就可以通过定位像素网格的横纵坐标来获取某一特定位置的像素值:
哎~~~~ 像素网格这不就和矩阵(Matrix)高度吻合了么?,像素网格中的每一个像素对应矩阵的元素!!!
从像素网格到像素矩阵(Pixel Matrix):
像素矩阵
可以很容易想到 >>>> 图像中的尺寸,有着宽度(width)和高度(height),而矩阵有着对应的行(row)和列(column)定义。矩阵中的每一个元素对应图像中的像素。
这样,我们就完成了:图像 >>>> 像素网格 >>>> 像素矩阵 的 “映射” 分析。
实际上,图像在计算机中的处理,就是 将对图像的操作转换成对图像像素矩阵的操作(计算机中矩阵的操作是非常常见且成熟的)。事实上所有的图像处理工具都是这么做的。
这里,将使用 Python 图像处理库 OpenCV 提供的方法来进行简单的图像读取和处理演示。
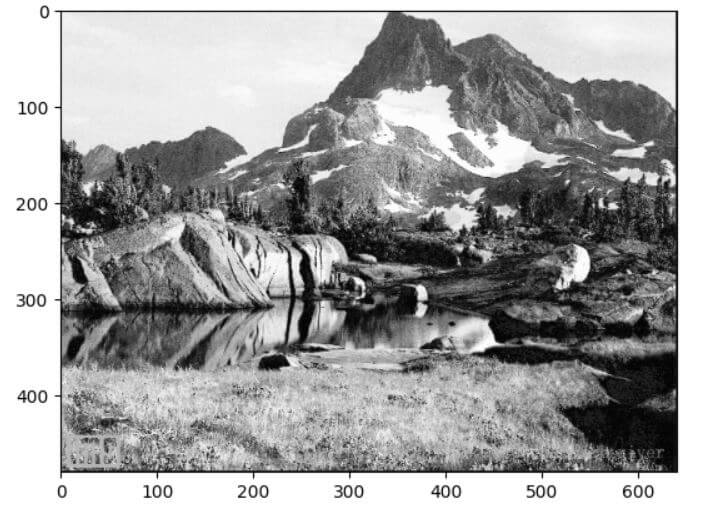
[1] >>> 图像读取和查看
1 | import cv2 |
可以看到,图像读取后,被存储到 NumPy 中的 ndarray 数组中。其中,图像的像素矩阵行(row)为 480 px,列(column)为 640 px;分别对应原始图像中的高度(width)和宽度(height)。
[2] >>> 获取特定位置的像素值
1 | print(mountain[100, 100]) |
可在,在像素矩阵中(100, 100)位置处的像素值为:236。
[3] >>> 图像裁剪操作
对图像像素矩阵的操作就是对原始图像的操作。例如选取像素矩阵中某个区域的值,也就是所谓的 Crop(图像裁剪)操作:
1 | print (mountain[9:12, 9:12]) |
输出以下子矩阵:
1 | [[244 244 244] |
我们来重新截取,并且显示一下截取到的图像:
1 | # 取大一些的区域,并显示出来。 |
裁剪区域的像素矩阵如下:
1 | [[132 236 228 ... 116 84 28] |
裁剪到的子图像如下:

最后再重新读取进来查看一下裁剪到的子图像所对应的矩阵:
1 | mountain_crop = cv2.imread('crop_image.png', 0) |
输出如下(结果和上述操作完全一致):
1 | Shape: (200, 400) |
RGB 色彩通道
上面为了避免图像彩色带来的复杂性,仅通过灰度图像引出像素矩阵(Pixel Matrix)的概念,这里我们重新来看彩色图像的像素矩阵。
毋庸置疑,彩色图像比灰度图像拥有更多的信息,如图:

通过 Python 图像处理库 OpenCV 查看其像素矩阵信息:
1 | import cv2 |
可以看出,彩色图像读取后仍然是 Ndarray 数组(但变为了 3 维)。不同的是,彩色图像像素矩阵中某个像素点的值成为一个包含 3 个数值的数组,如何理解?!!
三维堆叠像素矩阵
从上可以看出,计算机中,灰度图像是只有长和宽的二维像素矩阵,而彩色图像是三维堆叠像素矩阵。
事实上,彩色图像会被解析为具有宽(width)、高(height)和色彩通道(channel)的三维堆叠像素矩阵。从数组角度理解,axis=0 轴对应图像的色彩通道,axis=1 轴对应图像的高,axis=2 轴对应图像的宽。0 轴上的每一个元素都表征一个特定色彩通道(R/G/B)的像素矩阵。
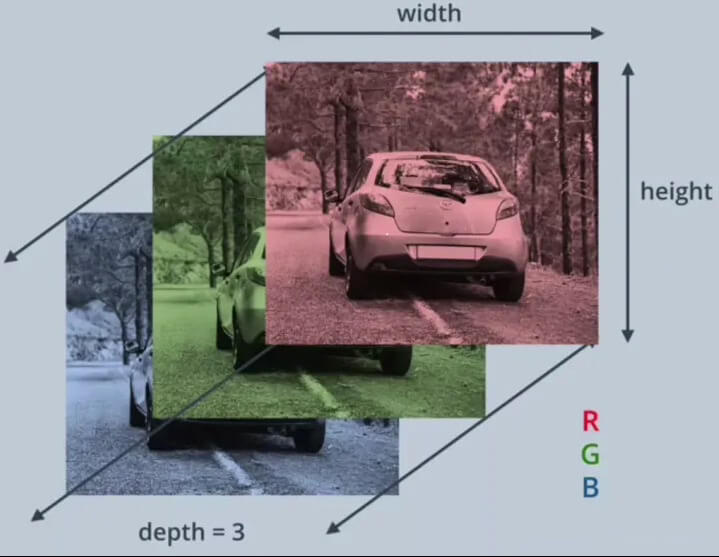
引入色彩通道,是由于大多数彩色图像可以仅通过三种颜色(三原色 >>>> 红:Red,绿:Green,蓝:Blue)组合来表示,就是我们常说的 RGB。
故,彩色图像的像素矩阵,可以看作 >>>> 三个表征不同色彩(R/G/B)的二维色彩图层堆叠而成!!!因此,获取图像中某像素位置处的像素值取到是包含 3 个值的数组,分别代表该像素点处的 R、G、B 值。
或者,你可以还可以理解为 >>>> 彩色图像的像素矩阵中的,任一像素点都可以分解为 R、G、B 三个基色分量!!!
二维 RGB 色彩图层
深入来看一下 RGB 各个色彩图层究竟是什么样子的?!!
需要注意的是,Python OpenCV 读取彩色图像对应的像素矩阵中顺序是 BGR。下面我们抽离出各通道矩阵来查看其图像:
1 | import matplotlib.pyplot as plt |
可视化输出如下:
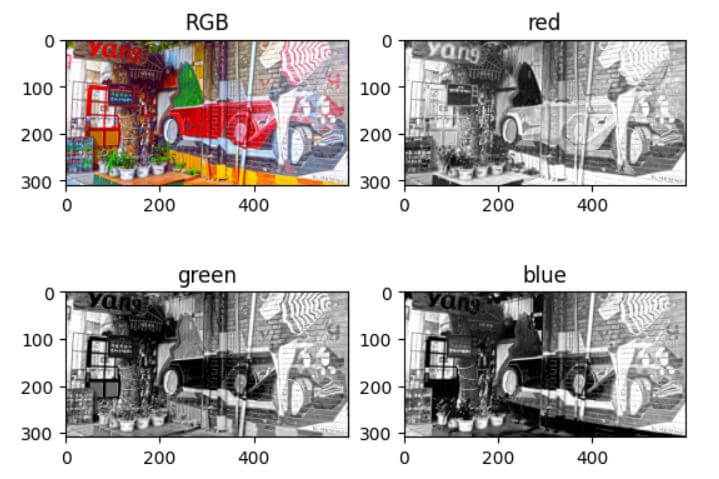
可以看出,抽离出的各色彩通道像素矩阵的灰度图,均为原始图像的完整图像,但细节处存在一定的差异。
为了更贴近彩色图像的像素矩阵表示,你可以将抽离出的各色彩通道像素矩阵转化为三通道彩色图:
1 | import matplotlib.pyplot as plt |
可视化输出如下:
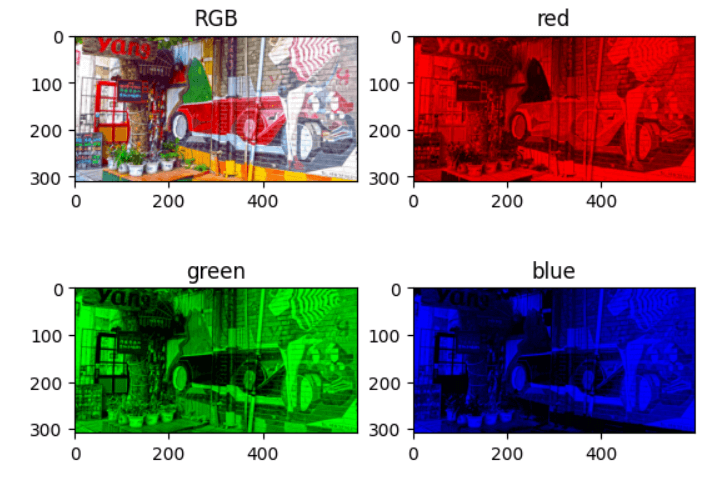
可以看出,每一个 RGB 通道都是一个像素矩阵。这 3 个 RGB 通道堆叠在一起形成了彩色图像~~~
灰度、灰度级与位深度
最近刚开始学数字图像处理,以为灰度只是表示黑白/深浅色图像。事实上,灰度(灰度值)只是表征单色的亮暗程度!!!灰度(灰度值)越大表示当前单色越亮。
例如,在黑白显示器中单指像素点显示的亮暗差别;而在彩色显示器中也表征像素点在不同色彩通道的亮暗程度,但不同亮暗程度 R/G/B 色彩分量的组合又表现为颜色的不同。灰度值越多,表现颜色越多,图像层次越清楚逼真。
而,灰度级 >>>> 取决于图像中每个像素点对应的存储单元位数(bit),限制了灰度(灰度值)的取值范围。
例如,某灰度图像中每个像素使用 8 位二进制存储(8 bit),其灰度级为 2^8 = 256,灰度值范围(亮暗范围)为 (0~255),也对应当前单色的 256 种亮暗变化色。
位深度 >>>> 即像素点存储单元位数(bit)。这就是我们常说的 8 位图、16 位图以及 32 位图等。
位深度和灰度级满足如下关系(其中,K 为位深度,L 为灰度级):
$$ L = 2^{k} $$
通常,图像像素矩阵中的灰度值位于图像可正常显示的整数范围 [0, L-1]。有时,出于算法开发以及计算的目的,你还会遇到对图像进行归一化的操作,它是将图像像素矩阵中的灰度值压缩到 [0, 1]。
| ================================================== Split Line =============================================== |
👇👇👇 常见位深度彩色图像 👇👇👇
各个色彩通道(R/G/B)上的灰度值范围由其所占用位数决定,对应各单色的亮暗变化色数量:
[1] >>> 8 位图像
存储一个像素需要内存:1 Byte
R:G:B = 2:3:3
可显示颜色:$$ 2^{8} = 2^{2}(B) * 2^{3}(G) * 2^{3}(R) $$
灰度级:255(2^8)
[2] >>> 16 位图像
存储一个像素需要内存:2 Byte
R:G:B = 5:6:5
可显示颜色:$$ 2^{16} = 2^{5}(B) * 2^{6}(G) * 2^{5}(R) $$
灰度级:65533(2^16)
[3] >>> 24 位图像
存储一个像素需要内存:3 Byte
R:G:B = 8:8:8
可显示颜色:$$ 2^{24} = 2^{8}(B) * 2^{8}(G) * 2^{8}(R) $$
灰度级:2^24
[4] >>> 32 位图像
存储一个像素需要内存:4 Byte
32 位图像:Alpha 透明度通道 + 24 位
| ================================================== Split Line =============================================== |
由上就可以计算,图像文件未经压缩的字节数 = 图像分辨率 * (位深度/8)。
例如,一幅分辨率为(640*480),位深度为 24 bit 的图像,其图像未经压缩的数据容量为:640 * 480 * (24 /8) = 900KB。
为什么要强调图像未经压缩?!!
这是由于,一张图片可以被保存为很多种不同的格式,例如:bmp/png/jpeg/gif,不同格式文件的压缩品质不同,还有的文件要记录操作信息(图层、通道等),所以上述只是基本的原理算法。
灰度/彩色/黑白图像
通过上面的说明,相信你对灰度图像、彩色图像的差异有了一定的认知。这里重新阐述一下:
彩色图像
彩色图像不同多说,其像素矩阵是由三个表征不同色彩(R/G/B)的二维色彩图层堆叠而成(三通道),也就说任一像素点都可以分解为 R、G、B 三个基色分量。
每个基色分量上的灰度值,直接决定了其基色的明暗强度!!!
| ================================================== Split Line =============================================== |
灰度图像
灰度图像,通常显示为从最暗黑色(0)到最亮的白色(255)的灰度(如下图)。

其像素矩阵就是一个单色的灰度值矩阵(单通道),灰度值表征单个像素点的亮度。
| ================================================== Split Line =============================================== |
黑白图像
黑白图像,也叫二值图像,是一种特殊的灰度图像。
与灰度图像不同的是,黑白图像中每个像素的灰度值仅能取 0 或者 255,分别代表纯黑和纯白。
需要注意的是,单通道图像一定没有彩色;没有彩色的图像不一定是单通道的灰度/黑白图像,比如所有像素分量均为 0 的纯黑彩色图像。
图像灰度化/二值化处理
大多数的计算机视觉场景下,灰度/黑白图像已经够用了。
故,一般会对原始图像进行灰度化/二值化处理,生成其灰度/黑白图片,减小了参与运算的图像像素矩阵的规模,可以提高算法的计算性能。
[1] >>> 灰度化处理
常用灰度化处理的方法:
浮点算法:
Gray = R*0.3 + G*0.59 + B*0.11;整数方法:
Gray = (R*30 + G*59 + B*11) / 100;移位方法:
Gray = (R*28 + G*151 + B*77) >> 8;平均值法:
Gray =(R + G + B)/ 3;仅取绿色:
Gray = G,图像中绿色通道的信息最全面。
| ================================================== Split Line =============================================== |
[2] >>> 二值化处理
二值化就是让图像的像素点矩阵中的每个像素点的灰度值为 0(黑色)或者 255(白色),也就是让整个图像呈现只有黑和白的效果。
那么一个像素点在灰度化之后的灰度值怎么转化为 0 或者 255 呢???比如灰度值为 100,那么在二值化后到底是 0 还是 255 ?!!
↓↓↓↓↓↓ 需要借助阀值来实现 ↓↓↓↓↓↓
1、取阀值为 127(相当于 0~255 的中数,(0+255)/2=127),让灰度值小于等于 127 的变为 0,灰度值大于 127 的变为 255。好处 >>>> 计算量小速度快;缺点 >>>> 因为这个阀值在不同的图片中均为 127,但不同图片的颜色分布差别很大,白菜萝卜一刀切的效果肯定是不好的。
2、像素矩阵中像素点的灰度值的平均值 avg 作为阈值,让灰度值小于等于 avg 的像素点就为 0,灰度值大于 avg 的变为 255。效果要由于方法一。
3、直方图方法(双峰法)来寻找二值化阀值。直方图方法认为图像由前景和背景组成,在灰度直方图上,前景和背景都形成高峰,在双峰之间的最低谷处就是阀值所在。取到阀值之后再一一比较就可以了。
彩色 Or 灰度/黑白???
上一小节说到,大多数的计算机视觉场景下,灰度/黑白图像已经够用了。为什么还需要彩色图像?!!
尽管彩色图像带来了不必要的复杂性且占用了更多的内存空间,但在某些任务中,图像色彩信息会非常有用!!!例如,识别交通道路线中的黄白线时,色彩就显得尤为重要了。
那么,到底什么时候需要保留色彩信息呢???
原则 >>>> 在计算机视觉应用中,如果对人眼来说,彩色图像识别起来更轻松,那么彩色图像对算法来说也更轻松些。
一言以蔽之,如果色彩的存在对最终的结果非常有帮助,那就用吧!!!
深入解析 RGB 图像灰度与通道
彩色图像/RGB 图像中,图像是一个三维矩阵,如:(244, 780, 3),其中 244 表示行数(高),780 表示列数(宽),3 代表三个基色分量(R/G/B)。如下:

每一层矩阵(244, 780, 0/1/2),分别对应 R/G/B 的灰度值像素矩阵。仅仅表示对应单色光灰度值,不是彩色的图像。如下:
1 | import matplotlib.pyplot as plt |
可视化结果如下:
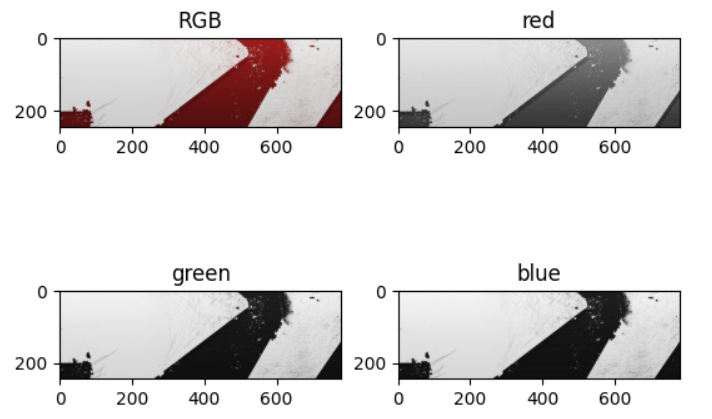
色彩通道类似颜料(基色),想要什么颜色,对应的通道里的灰度值就大一点就行了。如上图,随便在红色区域上取一个样点 (200, 400),其灰度值分别是(R:94, G:18,B:18)。
1 | print(original[200, 400]) |
所以在显示的时候,红色通道里灰度值大,绿色通道和蓝色通道里的灰度值小,显示出来的就是红色。
如果我们交换一下分量放置的顺序,把 G 分量放进红色通道里,把 R 分量放进绿色通道里,B 分量放进蓝色通道里,会怎么样呢???
1 | new_img = np.zeros_like(original) |
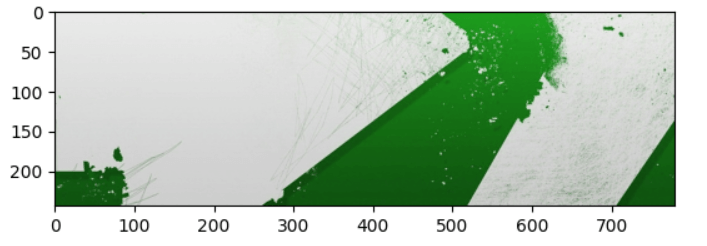
此时绿通道中的灰度值最大,红色通道和蓝色通道中的灰度值都较低,显示为绿色。
同理,如果把 B 分量放进红色通道里,把 R 分量放进蓝色通道里,G 分量放进绿色通道里,会怎么样呢???
1 | new_img = np.zeros_like(original) |
事实上,我们熟知的 RGB 色彩空间,就是把一种颜色,用 RGB 三个分量表达出来。此外还有 CMYK(四个分量)、Lab(三个)、HSV(三个)等等。不同色彩空间之间的关系,类似于空间直角坐标系(x, y, z),球坐标系(r, φ, θ)或柱坐标(r, φ, z)之间的关系。
https://blog.csdn.net/Dontla/article/details/106897794
https://blog.csdn.net/qq_41498261/article/details/104898045
https://blog.csdn.net/gaoxueyi551/article/details/112684581
https://blog.csdn.net/Strive_0902/article/details/78023080
https://zhuanlan.zhihu.com/p/427723550
https://blog.csdn.net/weixin_44489823/article/details/105996194
The Pixel Matrix Representation Of Image
https://www.orangeshare.cn/2018/02/01/the-pixel-matrix-representation-of-image/
install_url to use ShareThis. Please set it in _config.yml.